Autonomous Underwater Vehicle …
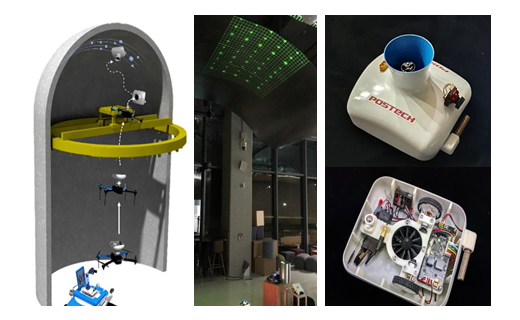
Underwater is one of the hazardous environments, and GPS and RF do not work. ‘Cyclops’ is an underwater robot of the hovering type, which enables precise 3-D position control in the water by using multiple propellers. I
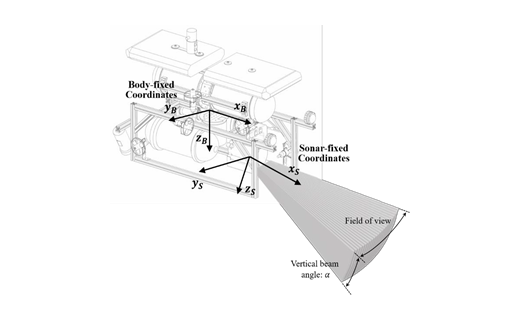
t is equipped with various measurement sensors and navigation sensors such as high-resolution still camera, lighting system, acoustic camera, laser, and chemical sensor, so it can respond to various missions.
It can be used for underwater precision tasks such as underwater environment and ecological inves…