DIVISION OF ADVANCED NUCLEAR ENGINEERING BY POSTECH
공지사항
DIVISION OF ADVANCED NUCLEAR ENGEERING BY POSTECH
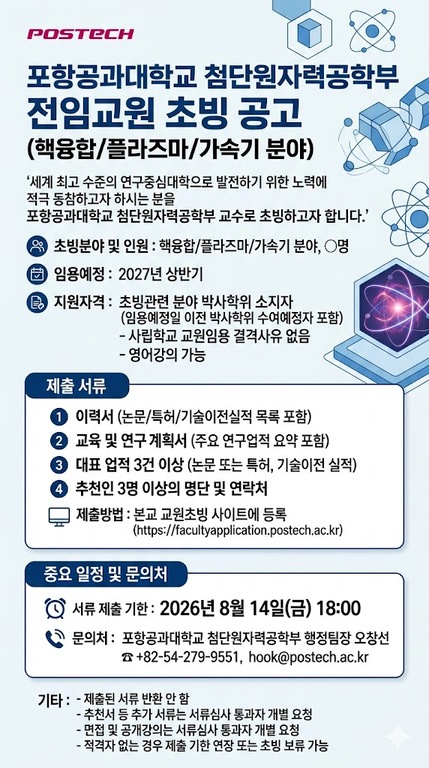
교수진
DIVISION OF ADVANCED NUCLEAR ENGEERING BY POSTECH
연구분야
-

- 원자력 안전 및 에너지 변환 분야
- MORE
-
-
-

- 인공지능-로봇 융합연구 분야
- MORE
-
DIVISION OF ADVANCED NUCLEAR ENGEERING BY POSTECH
DANE LAB-Cumentary
DIVISION OF ADVANCED NUCLEAR ENGEERING BY POSTECH
공지사항
DIVISION OF ADVANCED NUCLEAR ENGEERING BY POSTECH
교수진
DIVISION OF ADVANCED NUCLEAR ENGEERING BY POSTECH
연구분야
-
- 원자력 안전 및 에너지 변환 분야
- MORE
-
-
-
- 인공지능-로봇 융합연구 분야
- MORE
DIVISION OF ADVANCED NUCLEAR ENGEERING BY POSTECH
DANE LAB-Cumentary